
|
RS - La casa de los ingenieros

¿Dónde acude cuando necesita una solución?
No importa la dimensión del problema con el que se encuentre, estamos aquí para ayudarle a afrontar cualquiera de los retos que le presente la vida. Por eso queremos que se sienta como en casa.
RS es la única empresa que ofrece a los ingenieros un lugar para investigar, diseñar, crear prototipos, construir y mantener su producto o aplicación. En cuestión de diseño, creación y mantenimiento, queremos que tenga la sensación de "estar en casa" cuando venga a RS.
¿Por qué hacer de RS su hogar?
 Conocemos las necesidades de nuestros clientes y les facilitamos la vida. Le ofrecemos la garantía de que, con una amplia gama de productos en constante crecimiento, cualquier cosa que necesite estará disponible en RS a un solo clic.
Conocemos las necesidades de nuestros clientes y les facilitamos la vida. Le ofrecemos la garantía de que, con una amplia gama de productos en constante crecimiento, cualquier cosa que necesite estará disponible en RS a un solo clic.
Contamos con una excelente gama de productos y servicios para todos los mercados y aplicaciones. Concretamente, nuestra amplia gama de tecnologías, nuevos productos y herramientas de DesignSpark.
Con la introducción constante de nuevos productos, nos aseguramos de que esté siempre a la vanguardia en tecnología.
Además disponemos de una gama de productos de marca blanca, llamada RS Pro, que le garantizará calidad y rendimiento al mejor precio. Además de disponer de una excelente relación con nuestros proveedores estratégicos dentro del sector para que puedan elegir y comprar todos los productos que necesitan, en un mismo lugar.
Esto le garantizará elegir productos de marcas líderes a precios competitivos, sin tener que estar comparando precios en distintas webs online. Disponemos de 500.000 productos a su disposición a nivel global, entregados en el plazo de unas 24/48 horas, a través de nuestra red de centros de distribución global.
Y para esos momentos en los que necesite algo más de ayuda, nuestro equipo de atención al cliente y el equipo de soporte técnico especializado, estarán a su entera disposición. Porque RS quiere ir más allá de un mero sitio online, queremos ofrecer un servicio personalizado para cada uno de nuestros clientes.
Nuestro propóstio es que los ingenieros independientemente del sector en el que trabajen, se sientan como en casa cuando utilicen nuestros servicios...para así lograr ser su primera elección.
Más allá de los productos
 Y es que...no solo le ofrecemos producto. Como empresa, creemos que es vital apoyar la ambición e impulsar la inspiración de todos y cada uno de los ingenieros que acuden a nosotros.
Y es que...no solo le ofrecemos producto. Como empresa, creemos que es vital apoyar la ambición e impulsar la inspiración de todos y cada uno de los ingenieros que acuden a nosotros.
Para incentivar a las generaciones futuras a perseguir sus sueños, compartimos y respaldamos historias reales de aquellos clientes y proveedores que han conseguido logros increíbles.
Conozca las vivencias extraordinarias de personas del sector y entienda por qué nos apoyamos en nuestro slogan for the inspired.
Los ingenieros son personas con grandes ideas y, por eso, también disponemos de DesignSpark, que nace con el único propósito de conectar ideas y proporcionar a ingenieros y profesionales industriales soluciones a sus problemas de forma rápida y sencilla.
DesignSpark es, en definitiva, nuestra comunidad online para ingenieros que dispone además de una variedad de herramientas gratuitas para convertir sus ideas en realidad.
Una sensación de familiaridad
Tenemos recursos, componentes y servicios que le ayudarán en todo el proceso independientemente del sector en el que se encuentre...y además están todos en un solo lugar. Tanto si es un ingeniero mecánico, industrial o de mantenimiento, un arquitecto, un diseñador o simplemente un entusiasta aficionado, estamos aquí para ayudarle. Tenemos el producto, el servicio y el asesoramiento adecuados para que pueda lograr lo que se proponga.
Pero esto no se acaba aquí. Descubra más sobre mechatronica con artículos sobre mecatrónica en movimiento y la aplicación de sensores en tecnologías de mecatrónica.

DesignSpark
![]() DesignSpark es nuestra comunidad online de ingenieros. Es una plataforma online que
DesignSpark es nuestra comunidad online de ingenieros. Es una plataforma online que
permite a cualquier ingeniero compartir ideas y encontrar las herramientas ideales para
desarrollar sus proyectos.
¡Echa un ojo a los interesantes artículos publicados en la comunidadpor otros ingenieros!

El equipo Raspberry Pi Foundation ha desarrollado la nueva generación del Módulo de Computación Raspberry Pi, conocido como CM3.

Introducimos la cámara Intel RealSense ZR300, con funcionalidad de reconocimiento de personas y objetos y localización simultánea 6DoF y mapping.

¿Quiere saberlo todo sobre el Braccio Tinkerkit? Es el modo menos costoso y divertido de empezar su camino hacia la robótica.

Consulte esta guide del MeArm Robot Kit V1.1, que viene con todos los productos que necesita para construir un brazo robótico.
¿Qué hay dentro de un PLC?
Descubra qué componentes hay dentro de un complejo PLC – desde entradas digitales, puertos en serie y conectores cable a placa hasta aislamiento, memoria y una amplia gama de pasivos. Sabrá cómo se combinan para controlar los procesos de fabricación industrial.
La Mecatrónica en auge

El término 'mecatrónica' fue acuñado por primera vez en 1969 por Tetsuro Mori, un ingeniero en robótica de la empresa Yaskawa Electric Corporation. Es la combinación existente entre la mecánica y la electrónica.
ciencia informática con control mecánico,
eléctrico e ingeniería para diseñar, construir
y manejar productos. Actualmente se aplica en la vida cotidiana para soluciones en el transporte,
telecomunicaciones ópticas e ingeniería
biomédica, por nombrar algunos.
Para competir con éxito en un mercado global,
las empresas de fabricación modernas deben
tener la capacidad de integrar electrónica, control,
software e ingeniería mecánica en un rango
de productos y sistemas innovadores.
Y aquí es donde podemos ayudarle. Trabajamos
como “La Casa de los Ingenieros” porque
disponemos de todos los productos que necesita,
de las marcas líderes de la industria.
Mecatrónica en movimiento
 En 1768, el relojero suizo Pierre Jaquet-Droz se dio cuenta de que necesitaba un modo de aumentar las ventas. Junto con su hijo y un músico, Jean-Frédéric Leschot, construyó tres intrincados robots mecánicos. El más complejo podía controlarse con una rueda para escribir letras en función de los ajustes realizados en 40 levas.
En 1768, el relojero suizo Pierre Jaquet-Droz se dio cuenta de que necesitaba un modo de aumentar las ventas. Junto con su hijo y un músico, Jean-Frédéric Leschot, construyó tres intrincados robots mecánicos. El más complejo podía controlarse con una rueda para escribir letras en función de los ajustes realizados en 40 levas.
Con la tecnología del siglo XVIII, Jaquet-Droz y sus colegas tuvieron que limitarse a engranajes mecánicos, palancas y poleas. Pero aún así consiguieron crear autómatas que siguen cautivando a los visitantes del museo en Neuchâtel donde se exhiben. Los fabricantes de robots actuales tienen muchas opciones a su disposición. Los dispositivos como el motor paso a paso pueden parecer la opción evidente para integrar movimiento en los sistemas. Pero con frecuencia hay casos en los que tiene sentido emplear otra tecnología. Incluso los materiales gelatinosos pueden ser un impulso en el movimiento programable.
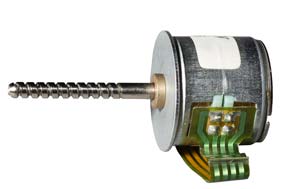 En robótica y aplicaciones mecatrónicas similares, el motor paso a paso sigue siendo una opción popular. El movimiento debe ser rotativo. Los tornillos sinfín y los componentes mecánicos similares, como los que fabrican Igus y Thomson Linear, convierten la rotación del motor en movimiento lineal. Los motores como el motor paso a paso de imanes de disco bipolares de Faulhaber se suelen suministrar con tornillos sinfín integrados.
En robótica y aplicaciones mecatrónicas similares, el motor paso a paso sigue siendo una opción popular. El movimiento debe ser rotativo. Los tornillos sinfín y los componentes mecánicos similares, como los que fabrican Igus y Thomson Linear, convierten la rotación del motor en movimiento lineal. Los motores como el motor paso a paso de imanes de disco bipolares de Faulhaber se suelen suministrar con tornillos sinfín integrados.
El motor paso a paso se basa en el motor DC, que rota siempre que se aplique una corriente, pero permite moverse fácilmente a una posición rotativa fija antes de detenerse. Este enfoque permite aplicaciones en las que se requiere un posicionamiento y un control de la velocidad precisos.
El motor paso a paso se diseña alrededor de un estator fijo que emplea varios enrollados de bobinas independientes. Este motor controla la posición de un rotor que utiliza materiales magnéticos permanentes o sus propios enrollados de bobinas para formar un imán cuando se aplica corriente. Los enrollados de bobinas fijos se utilizan para generar campos magnéticos de forma dinámica en dos o más posiciones alrededor del estator.
Cuando se aplica energía al motor, el rotor imantado rota hasta la posición más estable que encuentra, alineando su propio campo magnético de la bobina activa en el estator. Cuando llega el momento de moverse a otra posición, se retira la energía de la bobina, que es sustituida por otra, lo que fuerza al rotor a moverse de nuevo. Los motores paso a paso, como el RS Pro Hybrid, ofrecen ángulos de paso discretos de tan solo 0,9°. Sin embargo, la precisión del posicionamiento de los motores paso a paso no se limita a los pasos discretos. Los micropasos del microprocesador o el control lógico permiten crear sistemas de posicionamiento de alta precisión con ángulos de paso efectivos arbitrarios.
En lugar de retirar por completo la corriente de una bobina a la vez que se suministra energía a otra, en los micropasos la corriente se reduce en una mientras aumenta en la otra. El control del equilibrio de corriente permite implementar pasos virtuales más pequeños entre los pasos completos que se implementan físicamente.
Aunque el motor paso a paso permite un control del movimiento casi continuo a través de micropasos, puede presentar desventajas cuando es importante contar con una alta velocidad. Los motores con frecuencia se utilizan a bajas velocidades para ofrecer un control y un par máximos. Sin embargo, algunos productos como el motor paso a paso de imanes de disco Portescap pueden lograr una alta aceleración y velocidades de rotación de más de 10.000 rpm.
Un diseño continuamente variable como un motor sin escobillas puede ofrecer la combinación de par alto y posicionamiento preciso. Tradicionalmente, se utilizaban motores AC en las aplicaciones debido a su coste relativamente bajo en los casos en los que la precisión del movimiento no era una prioridad. Los problemas de par a baja velocidad han llevado a un aumento de las cantidades de capacidad de procesamiento de los motores AC. En la actualidad, las técnicas de control orientado a campo se utilizan ampliamente para mejorar la eficiencia de los motores AC y su par a baja velocidad, y han convertido gradualmente los motores AC sin escobillas en un contendiente en las situaciones en las que se requieren una alta potencia y precisión.
En el control orientado a campo, un modelo matemático de los campos magnéticos del motor se actualiza muchas veces cada segundo para proporcionar un cálculo estimado de la relación entre la tensión, la velocidad y el par dentro del motor. Los algoritmos de control de bucle cerrado ajustan los niveles de tensión y corriente de forma dinámica en cada uno de los enrollados que hay dentro del motor, no solo para maximizar el par, sino también para mover el rotor a posiciones específicas. Una ventaja de estas técnicas de control es que los cálculos estimados suelen ser lo suficientemente precisos para prescindir del uso de sensores de posición adicionales, lo que ayuda a reducir el coste general del sistema. El requisito clave es un procesador de alto rendimiento, como el procesador integrado ADSP-BF547 Blackfin de Analog Devices, además de controladores de sistema en chip (SoC) específicos, que simplifican la implementación de control orientado a campo para los usuarios. Entre los ejemplos se incluyen la gama de SoC TMPM370 de Toshiba, que combina un núcleo de procesador ARM Cortex-M3 con un coprocesador de control orientado a campo específico e interfaces de controlador de motor.
Para situaciones en las que se requiere menos fuerza pero es esencial una alta precisión en ambas direcciones, el accionador de bobina de voz es una buena elección. El accionador de bobina de voz es una implementación del principio de fuerza de Lorentz. Este determina que la fuerza de un conductor que transmite corriente en un campo magnético es proporcional a la fuerza del campo y la corriente.
El motor VCA se ha convertido en la elección para sistemas mecatrónicos diminutos, como los mecanismos de enfoque de las lentes de las cámaras de smartphones. Esto se debe a que al cambiar la dirección de la corriente se invierte la dirección de la fuerza. Como resultado, el accionador de bobina de voz se convierte en un accionador bidireccional de alta precisión que es capaz de soportar el iterativo proceso de tipo búsqueda binaria que permite a la lente de una cámara enfocar automáticamente. Además del diseño rotativo que se encuentra en las lentes, existen versiones lineales.
En términos eléctricos, los accionadores de bobina de voz son motores monofásicos y, por tanto, se pueden controlar de la misma forma que los motores DC sencillos. Tienden a ofrecer un buen rendimiento en cuanto a ruido audible, de ahí su uso en dispositivos móviles, además de una baja histéresis.

Un enfoque diferente del control del movimiento consiste en utilizar gas o líquido a presión para empujar los pistones. Debido a que son menos propensos a fugas de líquidos, los sistemas neumáticos suelen usarse más en los sistemas mecatrónicos más pequeños. Aunque se suele asociar a controladores industriales de gran tamaño, el control del movimiento neumático permite crear robots que se mueven de forma similar a los humanos y animales.
Los pistones se pueden implementar a lo largo de extremidades articuladas para que actúen como músculos artificiales. Se han utilizado, por ejemplo, en robótica para rehabilitación con el fin de ayudar a las personas a recuperarse de lesiones graves en las extremidades, a ponerse de pie y moverse o a ofrecer resistencia en ejercicios de fisioterapia.
En muchas situaciones, no es necesario el control continuo del movimiento. El movimiento puede consistir simplemente en abrir o cerrar una válvula, una acción que puede formar parte de un sistema hidráulico o neumático. En este caso la solución es un solenoide, que se compone de una bobina conductora envuelta alrededor de un armazón metálico móvil. El solenoide utiliza la ley de inducción de Faraday: el armazón se mueve en una dirección que aumenta la inductancia de la bobina.
Por lo general, la aplicación de una fuerza al solenoide obliga al armazón a moverse a una nueva posición. Una configuración habitual es un solenoide normalmente desconectado en una válvula: el armazón bloquea el flujo cuando no se aplica corriente. Cuando se introduce corriente, el armazón se mueve a una posición que permite el flujo de fluido o gas. Un ejemplo de este tipo de solenoide diseñado para control neumático es el Parker Viking Extreme G.
 Aunque muchos solenoides están diseñados para estados de activación-desactivación simples, también se utilizan solenoides proporcionales en algunos diseños para disponer de control variable. El solenoide proporcional equilibra la fuerza máxima que se puede aplicar mediante una corriente contra un resorte. Empezando desde los niveles más bajos, al aumentar la corriente de forma gradual el solenoide se mueve hasta su máximo alcance. Un problema del solenoide proporcional es la histéresis: al mantener la corriente en un determinado nivel el armazón no se restaura necesariamente al mismo punto que había alcanzado cuando la corriente subió a dicho nivel.
Aunque muchos solenoides están diseñados para estados de activación-desactivación simples, también se utilizan solenoides proporcionales en algunos diseños para disponer de control variable. El solenoide proporcional equilibra la fuerza máxima que se puede aplicar mediante una corriente contra un resorte. Empezando desde los niveles más bajos, al aumentar la corriente de forma gradual el solenoide se mueve hasta su máximo alcance. Un problema del solenoide proporcional es la histéresis: al mantener la corriente en un determinado nivel el armazón no se restaura necesariamente al mismo punto que había alcanzado cuando la corriente subió a dicho nivel.
Cuando se requiere una histéresis baja, posiblemente la mejor elección sea un accionador de bobina de voz lineal.
De cara al futuro, los innovadores materiales como los hidrogeles ofrecerán otras formas de control del movimiento. Algunos hidrogeles basados en polímeros pueden aportar grandes cambios de volumen cuando se aplica un campo eléctrico. Esto los hace útiles en situaciones en las que se requiere un músculo artificial o cuando la amortiguación activa junto al movimiento es una ventaja. Sin embargo, estos materiales están aún dando sus primeros pasos y los sistemas electromecánicos antes descritos seguirán siendo las opciones clave para los diseñadores de mecatrónica en un futuro cercano. No obstante, parece claro que hay muchas opciones disponibles gracias a la combinación de electrónica y mecánica, y cada una tiene sus propias ventajas para cada caso concreto.
Sensores en movimiento
 El Internet de las Cosas (IoT) actual es solo el comienzo de una revolución en la creación de un entorno más inteligente para nosotros. Puesto que se basa en sensores que envían datos a software inteligente que se ejecuta en servidores, parece que se trata de un sistema principalmente pasivo. El IoT respalda las decisiones en lugar de implementarlas. La mecatrónica cierra el bucle ya que facilita una interacción activa que ofrecerá mayor comodidad y eficiencia tanto en la industria, como en los hogares y el transporte.
El Internet de las Cosas (IoT) actual es solo el comienzo de una revolución en la creación de un entorno más inteligente para nosotros. Puesto que se basa en sensores que envían datos a software inteligente que se ejecuta en servidores, parece que se trata de un sistema principalmente pasivo. El IoT respalda las decisiones en lugar de implementarlas. La mecatrónica cierra el bucle ya que facilita una interacción activa que ofrecerá mayor comodidad y eficiencia tanto en la industria, como en los hogares y el transporte.
Los robots nos ayudarán a realizar las tareas rutinarias diarias, además de ayudar en la fabricación y la prestación de servicios. Algunas de sus funciones se están utilizando en vehículos a motor autónomos que nos transportan de un sitio a otro. Para hacerlo de forma segura y eficiente, estos robots deben saber dónde están. Las generaciones anteriores de robots para automatización de fábricas y maquinaria de producción no podían hacerlo porque funcionaban en jaulas de seguridad y seguían trayectorias predecibles programadas con antelación. Para ofrecer mayor flexibilidad y fiabilidad, la siguiente generación de equipos de producción debe ser capaz de monitorizar su propio movimiento y el de los demás en el lugar de trabajo.
Los dispositivos móviles actuales contienen acelerómetros, giroscopios y sensores de presión, además de receptores para detectar servicios del sistema global de navegación por satélite (GNSS). El resultado es una recopilación de entradas en tiempo real que permite detectar con precisión la ubicación del dispositivo prácticamente en cualquier lugar del mundo.
Hay un motivo por el que los dispositivos móviles, como los smartphones, incorporan distintos sensores para detectar el movimiento. Aunque no se ha diseñado expresamente para esa tarea, un grupo de acelerómetros distribuidos ortogonalmente a lo largo de los ejes "x", "y" y "z" permite detectar la rotación, además del movimiento a lo largo de una ruta lineal. Pero los acelerómetros tienen imprecisiones que pueden generar rápidamente errores de posición. Además, los acelerómetros pueden confundirse en cuanto a si el sistema no está realmente en movimiento. Una fuente continua de errores es la aceleración provocada por la gravedad. Puede resultar difícil que un acelerómetro pueda distinguir por su cuenta entres dos componentes de aceleración.
Un filtro de paso alto ofrece un mecanismo para filtrar el componente gravitacional de la aceleración, a la vez que mantiene la entrada de los componentes de aceleración que se prevé que cambien más rápido a causa del movimiento físico. Con frecuencia, un filtro de paso alto debe combinarse con un filtro de paso bajo para eliminar las fuentes de ruido y vibración de bajo nivel y alta frecuencia. Incluso así, el acelerómetro puede acumular errores debido a las numerosas fuentes de ruido a las que está sometido.
El giroscopio, en contraste con el acelerómetro, se ha diseñado para detectar el movimiento rotativo, aunque también ofrece señales complementarias a las del acelerómetro. Estas entradas permiten eliminar las problemáticas fuentes de ruido que se producen después del procesamiento digital.
 El giroscopio se ve afectado por un conjunto diferente de fuentes de ruido. La deriva es la fuente más habitual de error y se acumula con el tiempo. Las medidas de calibración de los propios sensores giroscópicos ayudan a recudir los errores provocados por la deriva y ofrecen un valor de compensación que se puede incorporar al bucle de integración. Pero en sistemas que ofrecen más de un tipo de sensor de movimiento, hay otra opción: la fusión de sensores.
El giroscopio se ve afectado por un conjunto diferente de fuentes de ruido. La deriva es la fuente más habitual de error y se acumula con el tiempo. Las medidas de calibración de los propios sensores giroscópicos ayudan a recudir los errores provocados por la deriva y ofrecen un valor de compensación que se puede incorporar al bucle de integración. Pero en sistemas que ofrecen más de un tipo de sensor de movimiento, hay otra opción: la fusión de sensores.
La fusión de sensores, como sugiere su nombre, cubre un grupo de algoritmos que combinan las entradas de diferentes tipos de sensores y las utilizan para crear un sensor virtual que es más preciso y fiable que cualquiera de los elementos independientes.
En la actualidad existen distintas técnicas para llevar a cabo la fusión de sensores que funcionan bien para monitorizar el movimiento. Un ejemplo de uso común actual es el filtro Kalman. En esencia, el filtro Kalman proporciona una media ponderada de las lecturas de los sensores. No es una simple media, sino que tiene en cuenta la incertidumbre. Las actualizaciones en el algoritmo que se considera que es más probable que sean más precisas reciben una mayor ponderación que las que se considera que tienen un mayor incertidumbre. El modelo interno del filtro ofrece la capacidad de adaptarse a los cambios en el rendimiento de los sensores que parecen inusuales en relación con el estado previsto, lo que ofrece respuestas más sólidas y ayuda a mejorar la fiabilidad general.
En el mercado se han presentado IC de hub de sensores que simplifican la integración de los datos de varios tipos de sensores y respaldan los algoritmos de fusión de sensores. Gracias al uso de filtros basados en hardware, permiten eliminar gran parte de la carga de trabajo del microcontrolador host. Esto permite reducir el coste del sistema y el consumo de energía en comparación con los algoritmos basados únicamente en software. La mayor integración ha generado dispositivos que combinan funciones de hub con los sensores en sí y el procesamiento necesario para implementar las tecnologías de fusión como el filtrado Kalman. Un ejemplo es el Bosch Sensortec BNO055, en el que se utiliza el software FusionLib de la empresa.
Gracias a su combinación de acelerómetro, giroscopio y sensor geomagnético, el BNO055 permite detectar el movimiento en nueve ejes, mientras que el software FusionLib combina las mediciones para formar un todo coherente. El dispositivo integrado libera a los clientes de la necesidad de desarrollar sus propios controladores y algoritmos de fusión.
Los detectores de movimiento proporcionan a un robot una imagen coherente de sus propios movimientos. Pero para moverse de forma segura, la maquinaria debe poder detectar el movimiento a su alrededor. Es en este punto en el que gana importancia la segunda clase general de sensores necesarios para un movimiento mecatrónico seguro y eficiente. Esta clase garantiza que todo el sistema de movimiento no choque accidentalmente con otros objetos y que el sistema sepa dónde se encuentra. En esta área se incluyen numerosas tecnologías de sensor.
Los más sencillos son los sensores diseñados para rastrear obstrucciones. Existen distintas tecnologías que respaldan esta aplicación. Hoy día, algunos robots emplean sensores de presión en su superficie para que se detengan cuando entran en contacto con una obstrucción o un objeto que deben manipular. Normalmente, este enfoque funciona con extremidades y motores que se mueven lentamente, y en los que el robot ejerce una fuerza relativamente baja. Las cortinas de luz, además de los sensores de proximidad por infrarrojos, son medios para detectar obstrucciones sin entrar en contacto con otro objeto. En ambos casos se utiliza el reflejo de las ondas que rebotan en el objetivo para determinar la distancia relativa hasta la obstrucción.
Las cámaras permiten un control más sofisticado de los sistemas mecatrónicos. No solo se incluyen las cámaras convencionales, sino también las cámaras de propagación, como el sensor REAL3 de Infineon Technologies, que permite trazar espacios 3D complejos en el campo de visión. La proliferación de las tecnologías de realidad virtual ayudará a reducir el coste de estos dispositivos, para que estén al alcance de muchos sistemas mecatrónicos autónomos de forma muy similar a la forma en la que el mercado de ADAS está ayudando a desarrollar sensores de radar y LIDAR de menor coste. Un ejemplo de tecnología de radar que se está incorporando al entorno industrial es la gama BGT24M/L de IC de ondas milimétricas de Infineon.
La clave para utilizar sensores más avanzados como los de radar y 2D, y las cámaras de propagación reside en los algoritmos avanzados basados en tecnologías de inteligencia artificial, como el aprendizaje profundo. Un problema clave de la mecatrónica móvil es el consumo de energía. Originalmente, el aprendizaje profundo se implementaba en microprocesadores y unidades de procesamiento de gráficos (GPU) de gama alta con enormes presupuestos de energía. Actualmente, los fabricantes de máquinas tienen a su disposición dispositivos especializados como el SoC Movidius Myriad-2. El Myriad-2, que ya se emplea en sistemas de asistencia al conductor, es un procesador de visión optimizado para aprendizaje profundo e inferencia en tiempo real. Con la ayuda de marcos de software disponibles de forma gratuita, como Caffe y Tensorflow, los integradores de mecatrónica pueden explorar sus capacidades fácilmente gracias al uso de la unidad de computación de red neuronal, que se conecta a un puerto USB.
A través de avanzados hubs de sensores y herramientas centradas en el desarrollo, como la unidad de computación de red neuronal, cada vez resulta más fácil para los desarrolladores trabajar en sistemas mecatrónicos y robóticos para actualizar la funcionalidad de sus diseños y ayudar a que sean más móviles. Con el crecimiento del mercado, los costes se irán reduciendo más y habrá disponibles soluciones adicionales, por lo que el movimiento inteligente se convertirá en una parte esencial del floreciente IoT.
Fabricantes destacados












Hable con nosotros #RSHome
|
|
|||||